
Home - Search - Browse - Alphabetic Index: 0- 1- 2- 3- 4- 5- 6- 7- 8- 9
A- B- C- D- E- F- G- H- I- J- K- L- M- N- O- P- Q- R- S- T- U- V- W- X- Y- Z
Kehlet Lenticular Vehicle
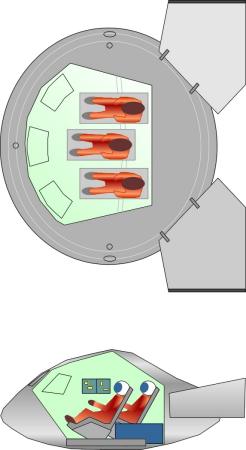 Langley Lenticular Credit: Mark Wade |
Status: Study 1961.
He was unsuccessful in getting the concept accepted for the Apollo program. In 1963 Kehlet, together with Dennis Hasson and William Petynia, were awarded US Patent 3,090,580 for the idea.
A lenticular vehicle would be capable of performing manned orbital and space missions, while possessing the atmospheric maneuverability of fixed wing aircraft. Winged and asymmetrical lifting body designs were capable of atmospheric maneuvering and glide type landings. However, for a fixed maximum total vehicle weight requirement for a given mission, the winged and the asymmetric vehicles required reentry thermal shielding over a much larger vehicle surface area, and heavy booster-vehicle adapter due to asymmetric loads during ascent to orbit.
A lenticular vehicle with foldable aerodynamic control flaps pivotally mounted on the upper convex vehicle surface solved these problems, while having the additional capability of horizontal land or water landings without the use of landing gear. The control flaps were adapted to form a continuous extension of the upper convex vehicle surface when retracted during the launch and orbital stages of the mission. They were deployed to the extended position only after reentry into the atmosphere. The spacecraft included individually actuated reaction jets positioned on the vehicle's upper convex surface for attitude control outside of the atmosphere.
The lower convex surface formed by a relatively thick, curved heat shield. This served two functions. It protected the vehicle and its occupants from the heat generated during reentry into the Earth's atmosphere. It also acted as a "skid-rocker" for the vehicle. The use of such a heat shield enabled the vehicle to land on hard surfaces without developing high impact loads, thereby obviating the need for providing additional, heavy, complicated landing gear. The vehicle could be provided with an extendible nose ski for landing on water. Observation windows were provided in the forward sector of the vehicle for visibility in orbit and during landing.
There were many advantages derived from utilizing a lenticular shaped body for a spacecraft:
- The lenticular vehicle had a higher usable volume to surface area ratio than a winged vehicle and required less thermal protection and shielded area than such a vehicle.
- The lenticular vehicle, because of its short afterbody in a high angle of attack attitude, i.e., volume to the rear of heat shield maximum diameter, would have less severe afterbody heating problems than the afterbody of a blunt nose-cone semi-lifting capsule or craft. Therefore the structural weight to total weight of the lenticular vehicle was less than either the winged or the semi-lifting designs.
- The lenticular vehicle, being symmetrical, permitted the use of a minimum strength and therefore lightweight vehicle-booster attachment adapter, and imposed lower aerodynamic loads on the booster than the winged or asymmetric vehicles, reducing booster control problems.
- The lenticular shaped vehicle was amenable to simple pressure compartment design.
- The lenticular vehicle, because of its circular planform and heat shield design, was, unlike the winged or asymmetric vehicles, inherently stable in both pitch and yaw at high angles of attack. Should the aerodynamic flaps fail to function due to some unforeseen failure, a successful reentry and landing could be accomplished with only the use of a parachute and reaction jet control.
An attitude control unit and a flap control unit were provided within the crew compartment, each operable either automatically or manually by the pilot. A system of individually actuated reaction jets was provided for attitude stabilization of the vehicle above the Earth's atmosphere and directional control within the atmosphere. The system comprised diametrically spaced pairs of nozzle orifices positioned on the upper convex surface of vehicle. The pitch control jets were located on the fore and aft axis of the vehicle while the roll and yaw control jets were positioned on the vehicle transverse axis. The jets were selectively actuated by the opening and closing of individual feed valves, connected between each jet and a hydrogen peroxide monopropellant fuel supply. The attitude control unit included a conventional gyro stabilization system for automatic operation.
To provide the desired atmospheric maneuvering capability, aerodynamic control flaps were folded or pivotally attached by hinges to the after, upper convex surface of vehicle. The flaps, when folded, formed a continuous extension of the convex upper vehicle surface. Either hydraulic or electrical servo mechanisms could be used to deploy and operate the flaps.
For glide type water landing capabilities an extendible nose ski could be fitted to the vehicle lower convex heat shield surface. For ascent into space, a low drag nose section, and escape system fins would be fitted. These would be jettisoned after cutoff of the first stage. For reentry the vehicle would be trimmed to a high angle of attack to produce high drag and moderate lift by means of the reaction jets. The lower convex heat shield surface was positioned foremost for protection of the vehicle and its occupants from the heat generated upon reentry. At approximately 30 km altitude, after peak heating, at a velocity of approximately Mach 2, the flaps would be pivoted into the extended, operative position. The pilot then maneuvered the space vehicle to the desired touchdown location, flaring to essentially zero sinking velocity for a horizontal landing.
The curved lower heat shield surface served as a skid-rocker to convert the vehicle sinking-speed energy into angular energy, through rocking oscillation of the vehicle on its lower convex surface, the energy being dissipated by friction and aerodynamic damping. If desired, a drag chute could be ejected from the vehicle upon touchdown to stabilize the vehicle in the edgewise direction. This landing method meant the lenticular space vehicle combined the lightweight structure and high usable volume inherent in the lenticular configuration with the high maneuvering capabilities at supersonic and subsonic speeds of the winged vehicle while eliminating the need for heavy, complicated landing gear systems. The vehicle would be launched into space as the final stage of a booster-vehicle system and therefore should initially be of such shape as to minimize the launch or boost vehicle's control and structural loading problems. The space vehicle must have an attitude stabilization system for employment while in flight outside the atmosphere. The vehicle must be capable of surviving and shielding its occupants from the heat generated during its subsequent reentry into the Earth's atmosphere. The vehicle had an atmospheric maneuvering capability allowing the occupants to control the rate of deceleration, to select a desired landing area for the vehicle and to perform a glide type landing.
Family: Lenticular Vehicles, Spaceplane. Country: USA. Bibliography: 4481.
Back to top of page
Home - Search - Browse - Alphabetic Index: 0- 1- 2- 3- 4- 5- 6- 7- 8- 9
A- B- C- D- E- F- G- H- I- J- K- L- M- N- O- P- Q- R- S- T- U- V- W- X- Y- Z
© 1997-2019 Mark Wade - Contact
© / Conditions for Use